Open-source 3D-printed robot adds GPT-level AI for tracking and chat
This InMoov rebuild ships STL files and code for a printable humanoid that tracks objects, talks back, and shows how far open-source robotics has come.

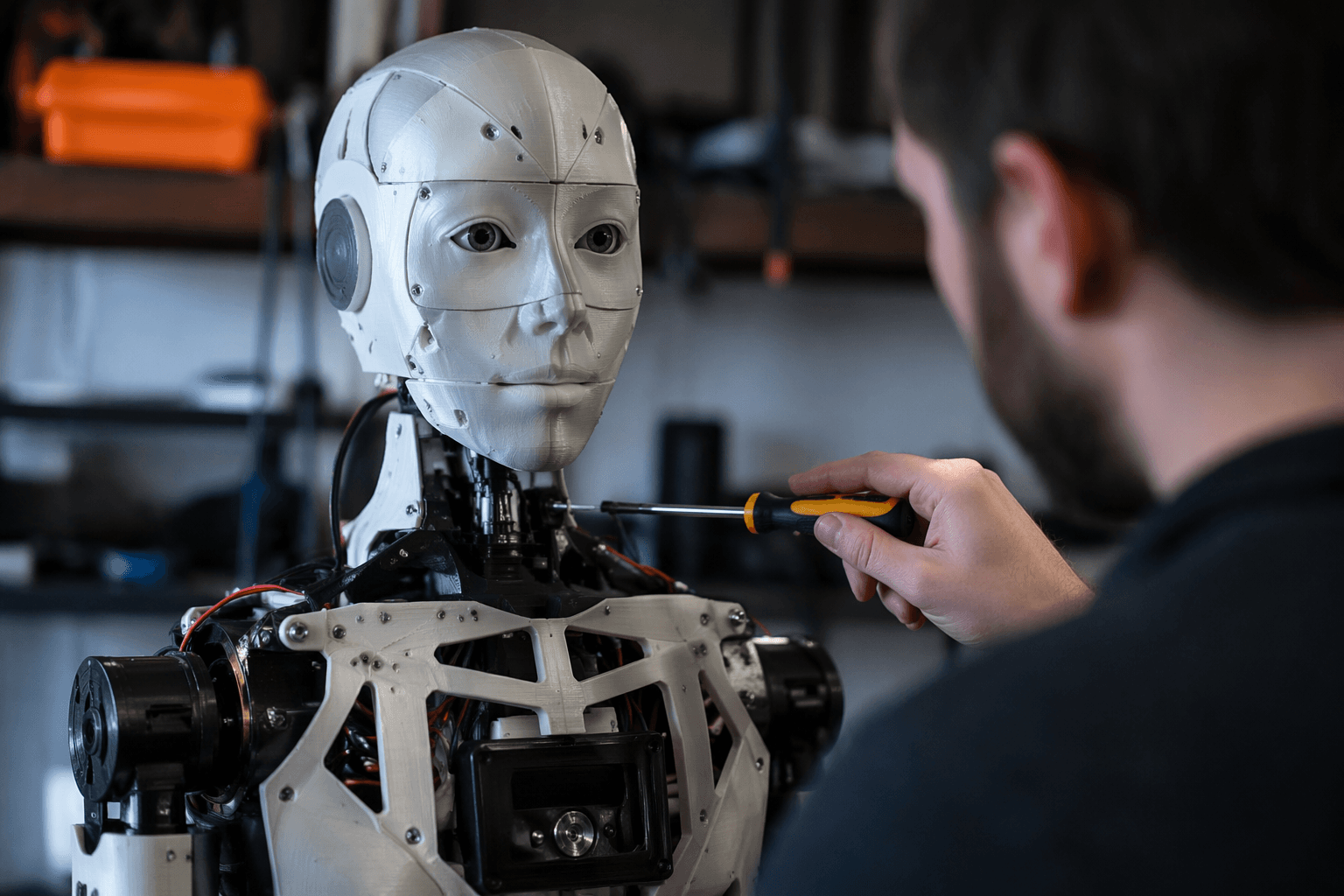
A new open-source humanoid robot build is putting a very modern twist on a very familiar maker promise: print the parts, wire it up, load the code, and bring the machine to life. The project drops full STL files, CAD, and source code for a 3D-printed robot that can track objects and hold a conversation, turning advanced robotics into something a serious home workshop can actually reproduce.
Why this build stands out
What makes this release compelling is not just the AI layer. It is the fact that the whole stack is being handed over in a form that fits the way the 3D printing community already works, with printable structure, open-source software, and off-the-shelf electronics stitched into one build path. That combination matters because it lowers the gap between watching a robot demo and building one on your own bench.
The project sits in a part of the hobby that has been steadily maturing for years: not toy bots, but full humanoids and arms that can be printed, assembled, and extended with real software. Instead of treating AI as a flashy add-on, this build uses it as part of the robot’s core behavior, with real-time object detection, tracking, and voice interaction built into the experience.
The InMoov lineage behind the rebuild
To understand why this release resonates, you have to start with InMoov. Gaël Langevin says the project began in January 2012, and describes it as the first open-source 3D-printed life-size robot. It was designed to be replicated on a home printer with a 12x12x12 cm build area, which is a small but crucial detail: the project was never meant to live only in a lab or a commercial shop.
InMoov was also framed from the start as a development platform for universities, laboratories, hobbyists, and makers. That positioning helped it spread far beyond a single build log, and the official project says it has been reproduced by builders around the world. The new AI-powered rebuild leans directly on that history, using InMoov as the base and pushing it into a much more software-driven era.
What you can print, and what still takes real work
The release of full STL and STEP CAD files is the part that makes this useful to a builder. Those files define the mechanical side of the robot, which means the frame, shells, mounts, and structural parts can be produced on consumer printers instead of custom machining equipment. That is the biggest replicability win in the whole story.
But the project also makes the bottlenecks obvious, which is exactly what matters for anyone planning a weekend-scale build. You still need to source and integrate servos, microcontrollers, a camera and voice setup, power delivery, and a compute stack strong enough to handle vision and inference. In practice, this is where open-source robotics lives or dies: not on whether a part can be printed, but on whether the wiring, motion tuning, and software integration stay manageable.
A good way to think about the split is this:
- Printable: robot structure, brackets, shells, and the geometry captured in STL and STEP files.
- Non-printable: compute hardware, motors, servos, wiring, power, sensors, and the AI runtime.
- Hardest part: making all of it behave like one coherent machine.
That balance is why this release is more than another pretty robot shell. It is a roadmap for building something substantial without pretending the electronics and software side are trivial.
How the AI layer is actually being used
According to the GitHub repository, the rebuilt InMoov uses ROS, OpenCV, NVIDIA Jetson Nano, TensorRT, Python, and STL/STEP CAD files. That is a very recognizable open robotics stack: ROS handles the robot middleware, OpenCV handles the vision side, TensorRT helps speed up inference on NVIDIA hardware, and Python ties the system together.
The same repository says the robot includes real-time object detection and tracking, synchronized movement, and AI-based voice interaction. In plain terms, that means the robot is not just responding to pre-scripted motions. It is meant to look at a scene, follow objects, and speak back in a way that feels like a living system instead of a static animatronic build. The project was developed under the guidance of Reffto, which adds another layer of community continuity to the build.
For builders, this matters because it shows where the labor is moving. The old challenge was whether you could print a humanoid frame at all. The new challenge is whether you can make that frame sense, respond, and converse without turning the whole project into a permanent debugging session.
The broader open-source robotics stack is catching up fast
This InMoov rebuild is not happening in isolation. TheRobotStudio’s SO-100 and SO-101 arm projects show the same push toward printable, software-ready hardware. The SO-101 is the next-generation version of the SO-100, with improved wiring, easier assembly, and updated leader-arm motors, and both are designed to work with Hugging Face’s open-source LeRobot library.
That matters because it points to a standardizing ecosystem. Instead of every builder inventing a new control stack, more projects are now converging on reusable components, shared libraries, and known assembly patterns. When a printed arm can plug into LeRobot, or a humanoid can lean on ROS and OpenCV, the learning curve starts to look more like integration work than pure invention.
ALANA, another recent open-source humanoid build from Shashwat Batish, pushes the same trend even further. Hackster.io reported in 2025 that ALANA is a fully 3D-printed, life-size humanoid robot with object and facial recognition, conversational capabilities, and working hands, built for about $70 in parts including 3D printing materials, electronics, and power supply. It also uses six degrees of freedom per arm and a local Llama 3-based language model backend for conversation, which makes it a strong proof point for low-cost AI robotics.
Why this matters to the workbench
Taken together, these projects redraw the line between “impressive demo” and “buildable machine.” The important shift is not only that the robot can track objects or chat, but that the parts, code, and design files are being released in a form that lets a single builder reproduce the work with consumer printers and open-source tools.
That is the real breakthrough here. A few years ago, a humanoid with vision and voice would have felt like a lab-only artifact. Now the open-source stack is dense enough, cheap enough, and documented enough that a determined maker can start with printable hardware and end up with a robot that sees, listens, and responds.
And that is why this InMoov rebuild lands as more than a flashy robot clip. It shows exactly what happens when printable hardware, accessible compute, and modern AI tooling finally meet in one project you can actually build.
This article was produced by Prism’s automated news system from verified source data, official records, and press releases, then run through automated quality and moderation checks before publishing. The system is built and supervised by the people who set the standards it runs under. Read our full AI policy.
Did this article answer your question?