Meshtastic adds WebAssembly hello world to Portduino
A June 26 Portduino hello-world PR signaled Meshtastic’s next portability step: WebAssembly could make testing easier without flashing a radio first.
Meshtastic’s firmware repository gained a small but revealing pull request on June 26: Portduino WASM hello world, opened as PR #10793 by thebentern. The change was only a scaffold, but in a project built around portable node firmware, it pointed toward a bigger goal, bringing Meshtastic logic closer to a browser-friendly environment without starting from scratch.
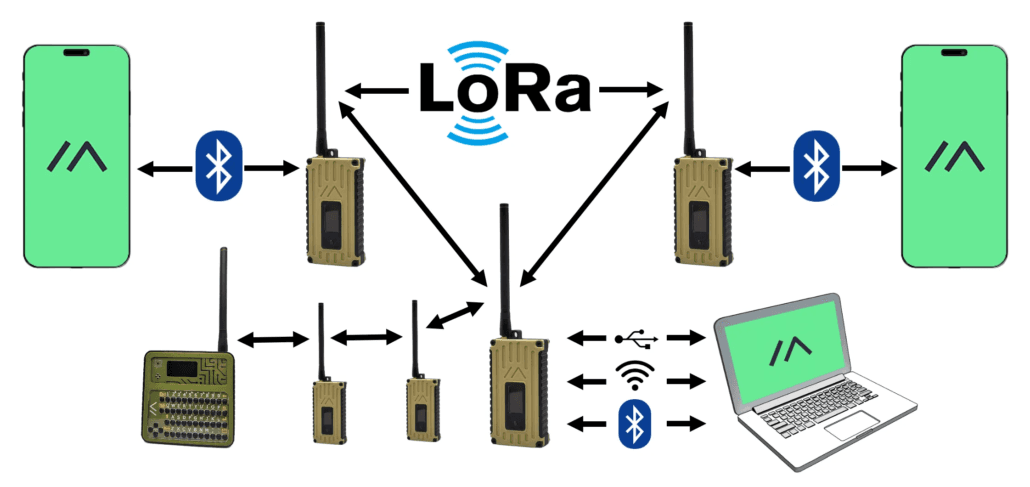
Portduino already exists to move firmware-style code off embedded hardware and onto Linux and other desktop operating systems as a standard user-space application. Meshtastic’s Linux development docs say firmware from version 1.3.42 and later can simulate the LoRa chip by sending and receiving Meshtastic packets over a local TCP port, and that multiple native instances can behave like separate LoRa nodes. That same portability stack is what makes the new WebAssembly work worth watching.
MeshtasticD extends that approach on Linux and macOS. The project documents it as a native binary that can make a computer function as a Meshtastic node, with a local TCP port for the Meshtastic API and a virtual filesystem directory. Meshtastic’s interactive simulator, interactiveSim.py, builds on MeshtasticD to run multiple instances, forward messages based on simulated node positions and a pathloss model, and it still notes one important limit: packet collisions are not yet simulated.
The newer meshtastic/platform-wasm repository shows where the experiment may be headed. Its README describes it as the WASM sibling of platform-native, using the same Portduino Arduino core and framework-portduino package, but swapping the host GCC and Clang toolchain for emcc and em++ and linking as an Asyncify ES module. The README also says firmware setup() and loop() stay unchanged, while the radio HAL talks WebUSB. That combination suggests an effort to carry the existing firmware runtime into a browser-adjacent setting rather than rebuilding Meshtastic into something new.
The payoff could be practical: easier demos, browser-accessible test harnesses, and a safer way to validate behavior before anyone reaches for a board and flashes hardware. That matters in a community where contributors work across different radios, operating systems, and development setups, and where lowering friction can decide whether a new idea gets tried at all. The broader pull request trail backs that up, from Native MacOS hello world #10309 and MacOS CH341 LoRa-hardware support #10320 to TCP support for Meshtastic MCP interface tests in #10355 and Add gpsd support to portduino/native #10781.
The Portduino WASM hello world did not ship a browser client, but it did show Meshtastic pushing the portability layer in a new direction. For a project that has steadily moved from embedded hardware to Linux, macOS, simulation, and now WebAssembly, even a hello world marks the next place where the firmware might run before it ever reaches a radio.
This article was produced by Prism’s automated news system from verified source data, official records, and press releases, then run through automated quality and moderation checks before publishing. The system is built and supervised by the people who set the standards it runs under. Read our full AI policy.
Did this article answer your question?