Tokio explains the runtime powering async Rust apps
Tokio’s runtime turns async Rust from theory into throughput, and understanding its scheduler changes how you debug latency, queues, and I/O.
Why Tokio still sits at the center of async Rust
Tokio looks simple from the outside, but the real story is hidden in the machinery that makes async Rust feel effortless. A new Let’s Get Rusty explainer puts that machinery front and center, showing why the runtime matters when you are chasing latency, balancing I/O, or trying to understand why a task is stalling instead of making progress.

That matters because Tokio is not just another crate in the ecosystem. Tokio describes itself as a runtime for writing reliable asynchronous applications with Rust, and the project frames it as the backbone for async I/O, networking, scheduling, timers, and more. It is also the most downloaded async Rust crate ever built, which tells you how much of modern Rust server-side code now depends on its design choices.
What Tokio is actually doing for you
At the core, Tokio is a multi-threaded runtime for executing async code, paired with an asynchronous version of the standard library. Its own documentation emphasizes consistent behavior with no surprises, which is a quieter but important promise for production systems where jitter and hidden bottlenecks are often worse than raw slowness.
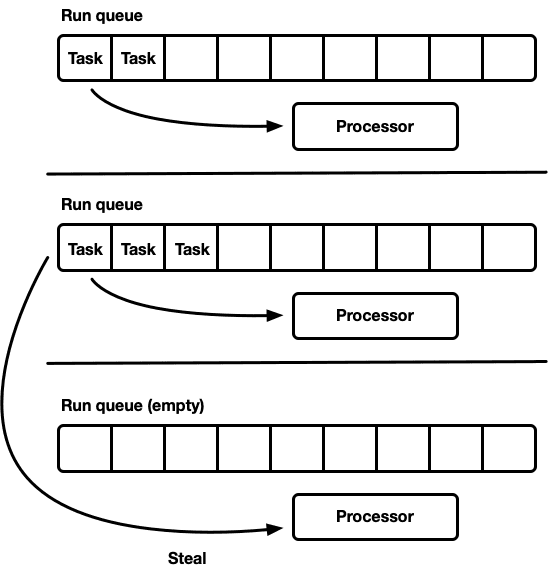
The runtime’s architecture is built around a multi-threaded, work-stealing scheduler. That phrase sounds abstract until you connect it to real application behavior: Tokio is deciding where work runs, when it gets rescheduled, and how to keep cores busy without letting one overloaded worker drag the rest of the system down. The result is that a task model built for cooperatively scheduled async code can still scale to high concurrency without forcing you to hand-roll the plumbing.
Tasks, queues, and the piece most people never see
The video’s chapter structure makes its focus clear: Tokio itself, tasks, the scheduler and executor, local and global queues, the reactor and operating-system event loop, and then a full task lifecycle walkthrough. That is the right map to study if you want to understand how async Rust actually moves work through the machine instead of treating `.await` as magic.
Tokio’s scheduler documentation explains that tasks are runnable when they can make progress and idle when they are blocked on an external resource. That detail is the key to reading performance correctly: a slow task is not always CPU-bound, and a quiet task is not necessarily finished. If a worker’s local queue fills up, Tokio pushes the excess into a global multi-producer, multi-consumer queue, which is checked less frequently. That design keeps the runtime responsive, but it also means queue behavior can shape how your application feels under load.
The reactor and the OS event loop are the other half of the story. Tokio is not just scheduling Rust futures in a vacuum, it is coordinating with operating-system events so that sockets, timers, and other resources wake tasks back up at the right moment. For developers, that is the difference between an app that seems to work and one that stays predictable when traffic spikes or a network call lingers.
Why this changes how you build and debug
This is where understanding Tokio pays off immediately. If you know the runtime is balancing work through local queues, a global queue, and a work-stealing scheduler, then a latency spike stops looking like an opaque “async problem” and starts looking like a systems problem you can reason about. You can ask better questions about whether a library blocks the runtime, whether a task is holding onto a resource too long, or whether your concurrency model is creating pressure in one part of the scheduler.
Tokio’s own positioning reinforces that this is a practical runtime, not a theoretical one. The project says it can process hundreds of thousands of requests per second with minimal overhead, which is the kind of claim that matters when you are deciding whether to build a service around it. The broader implication is that choosing Tokio is also choosing a set of tradeoffs: you get structured concurrency, I/O integration, timers, and scheduling, but you also need to understand how those layers interact if you want to get the best results.
For library selection, that means the runtime is not a background detail. If a crate sits on top of Tokio, it inherits Tokio’s execution model, task behavior, and queueing assumptions. That is why the explainer lands as more than a basic introduction: it helps readers see where runtime design shapes library behavior, and why “it just works” often really means “a lot of careful engineering is working behind the curtain.”
How Tokio fits into async Rust’s history
The runtime’s importance becomes clearer when you remember how young async Rust is. Rust stabilized the Future trait in Rust 1.36.0 on July 4, 2019, and async/await syntax followed in Rust 1.39.0 on November 7, 2019. The Rust blog said those zero-cost futures ideas were first proposed in 2016, which puts the language and the ecosystem on a long timeline of catching up to a real need for efficient asynchronous I/O.
The Rust async book also spells out why runtimes like Tokio mattered so much: executors, tasks, reactors, combinators, and low-level I/O futures and traits were not yet provided by the standard library. That left a real gap for the ecosystem to fill, and Tokio became one of the clearest answers. In that sense, Tokio did not just benefit from async Rust becoming stable, it helped define what production-ready async Rust looked like before the language itself had all the pieces.
Tokio’s own evolution shows how much is riding on the scheduler
Tokio’s project blog records major milestones that tell the same story from inside the ecosystem. There is the 2019 post about making the Tokio scheduler 10x faster, the announcement of Tokio 0.3 and the path to 1.0, and then the 2020 announcement of Tokio 1.0. Those milestones matter because scheduler design is not a footnote in async Rust, it is the thing that determines whether the runtime stays fast as workloads grow.
The specific queueing idea the video highlights comes straight from that scheduler work. When a queue is full, Tokio moves the excess task into the global queue instead of just letting the local queue grow without restraint. That kind of detail is exactly what turns a runtime from a black box into a tool you can trust under pressure.
Tokio’s current releases page shows v1.52.3 published on May 8, 2026, which is a useful reminder that this runtime is still moving, still maintained, and still central to the ecosystem. Around it sit libraries and projects such as Hyper, Tonic, Tower, Mio, and Tracing, which shows how far Tokio’s influence reaches across the async Rust stack.
That is why the runtime conversation matters now. Tokio’s appeal is not that async Rust happens to work, but that its scheduler, queues, reactor, and OS integration make it work predictably when the load is real. Once you understand that machinery, you stop treating Tokio as a magic dependency and start reading async performance the way Rust expects you to: as a system with structure, tradeoffs, and consequences.
This article was produced by Prism’s automated news system from verified source data, official records, and press releases, then run through automated quality and moderation checks before publishing. The system is built and supervised by the people who set the standards it runs under. Read our full AI policy.
Did this article answer your question?