ETH Zurich Releases Open-Source 3D Printed Robot Hand for Under $2,000
ETH Zurich's open-source Orca hand brings 17-DoF dexterous robotics to your print bed for under $2,000, roughly 50x cheaper than commercial equivalents costing over $100,000.
Advanced robotic hands cost over $100,000 and require constant maintenance. ETH Zurich's Soft Robotics Lab just made that price tag look absurd.
The open-source ORCA hand is a reliable, anthropomorphic 17-DoF tendon-driven robotic hand with integrated tactile sensors, fully assembled in less than eight hours and built for a material cost below 2,000 CHF. At current exchange rates, that lands comfortably under $2,000 USD, putting a genuinely capable dexterous robot hand within reach of any well-equipped maker or university lab.
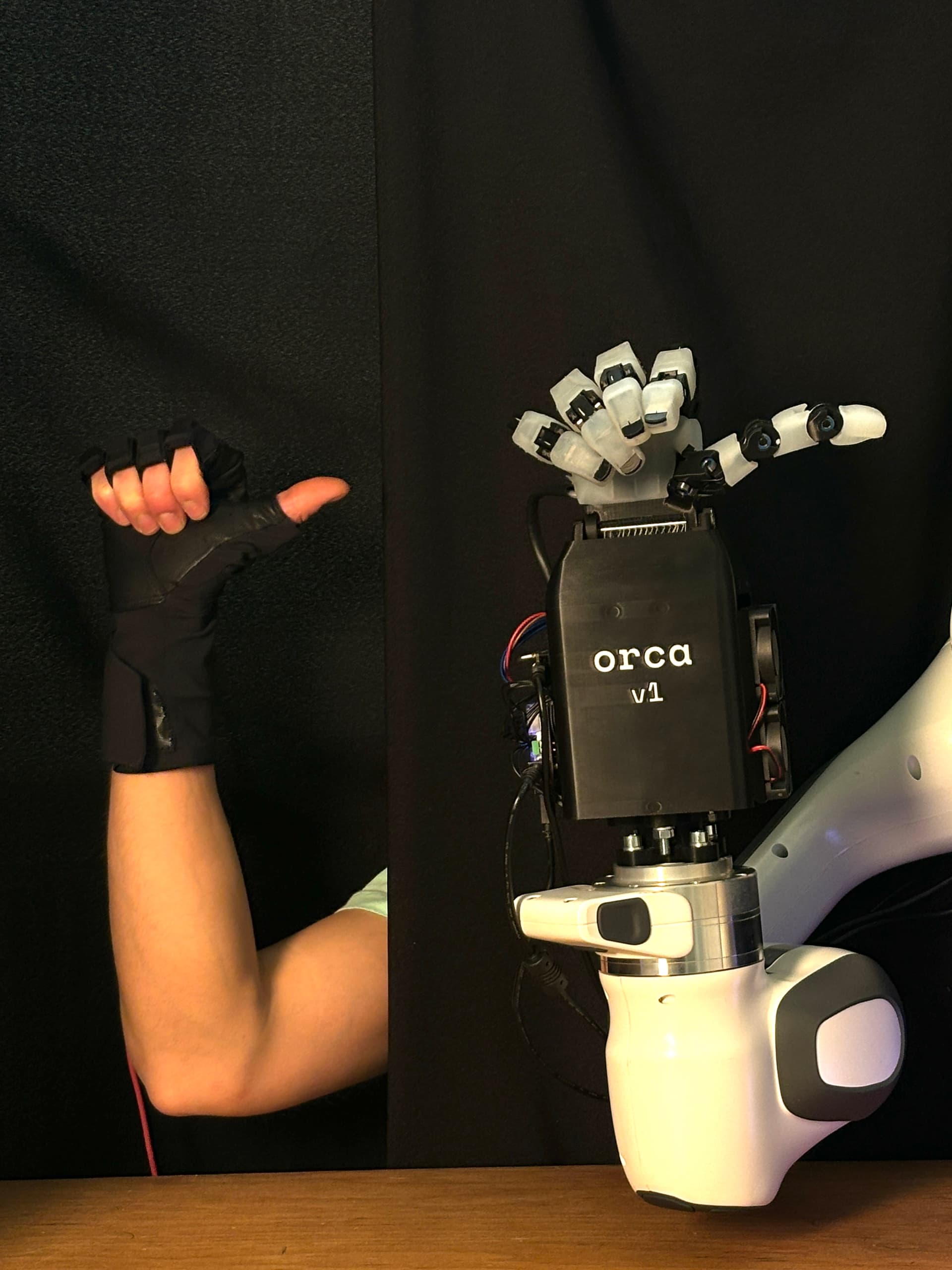
Designed to match the proportions and joint layout of the human hand, the ORCA v1 includes an opposable thumb and an actuated wrist, mirroring human joint configurations including MCP, PIP, and ABD joints. The hand runs 16 finger degrees of freedom and one wrist DOF on a tendon-based system powered by Dynamixel servos, with tendons routed through the center of rotation of each joint to keep friction low and performance consistent over time. The artificial tendons themselves are braided nylon fishing line, 0.4 mm in diameter.
The team out of ETH Zurich's Soft Robotics Lab, led by Robert K. Katzschmann and built by an 11-person team including Clemens C. Christoph, Maximilian Eberlein, and Filippos Katsimalis, put serious engineering into keeping the hand alive under stress. The standout design detail: joints that safely dislocate under excess load instead of snapping. If something pops, you push it back in. No replacement parts, no downtime. All structural components can be printed using a standard 3D printer, and the remaining off-the-shelf parts are widely available and easy to source online.
Durability numbers back up the design philosophy. The ORCA hand withstood more than 10,000 continuous operation cycles, equivalent to approximately 20 hours, without hardware failure, the only constraint being the duration of the experiment itself. Auto-calibration is handled through the tendon routing geometry itself rather than requiring external setup routines, and the hand has been benchmarked across a variety of tasks, ranging from teleoperation and imitation learning to zero-shot sim-to-real reinforcement learning.
The anthropomorphic structure significantly simplifies teleoperation and retargeting, and facilitates more straightforward training on human hand data. That matters enormously for anyone trying to build manipulation policies: the ORCA hand can plug directly into existing human-motion datasets without custom translation layers.
The design can be assembled by a single person without prior experience in less than eight hours. All design files, source code, and documentation are available through ETH Zurich's Soft Robotics Lab. For a community that has spent years watching dexterous robot hands exist only in well-funded university labs or behind six-figure price tags, the ORCA release is a genuine inflection point.
This article was produced by Prism’s automated news system from verified source data, official records, and press releases, then run through automated quality and moderation checks before publishing. The system is built and supervised by the people who set the standards it runs under. Read our full AI policy.
Did this article answer your question?


