Harvard researchers 3D print soft filaments that move with heat
Harvard’s new filament prints with motion built in, curling and twisting when heated, a step toward self-actuating soft parts.
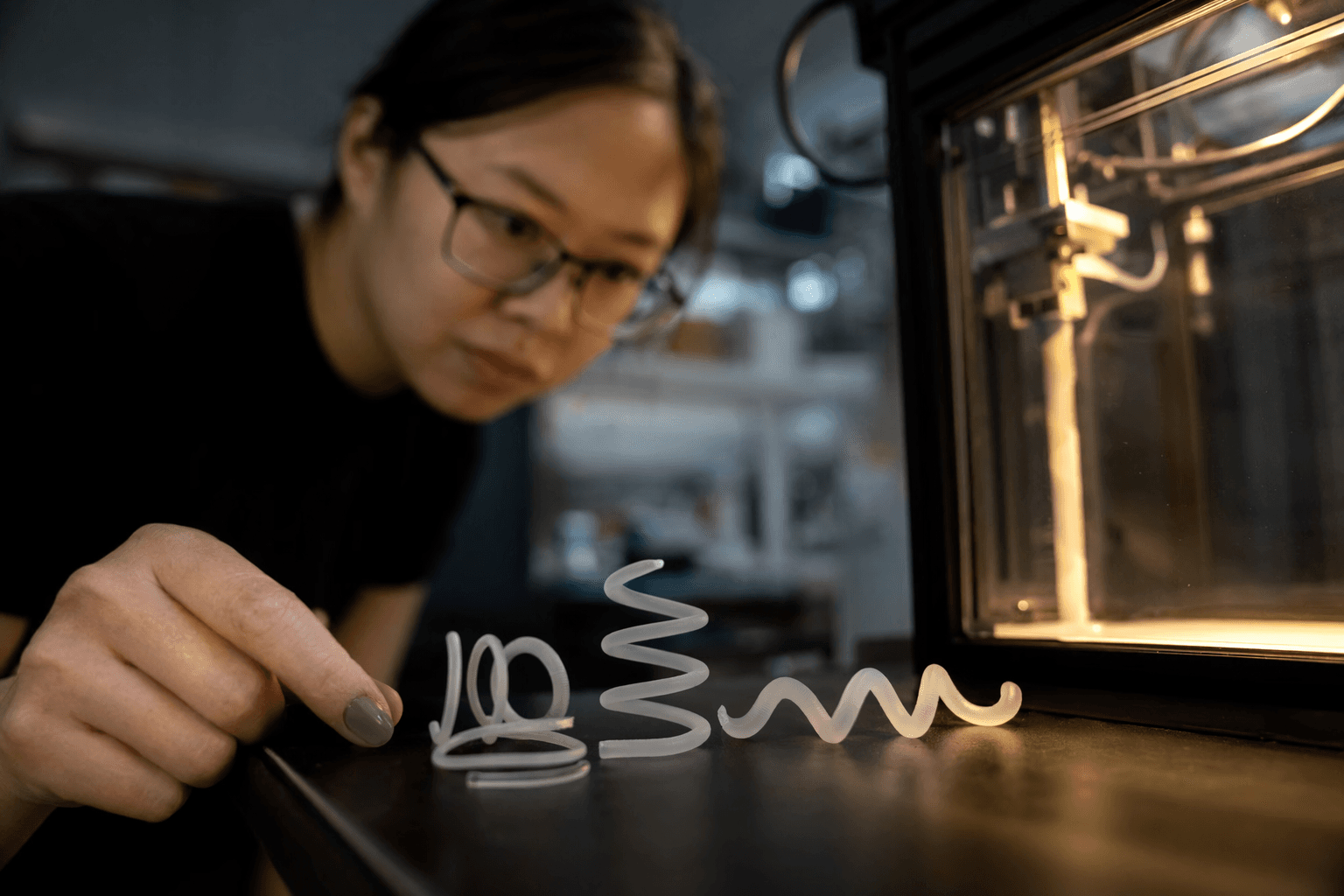
A filament that can curl, twist, stretch, or clamp itself when heated is no longer just a soft-robotics thought experiment. Harvard researchers have shown how to print the motion directly into the strand, using a multimaterial process that pairs active liquid crystal elastomers with passive elastomers so the part is already wired for movement as it leaves the nozzle.
The work came from Jennifer A. Lewis’s lab at Harvard SEAS, led in the paper by postdoctoral researcher Mustafa Abdelrahman. The group calls the method rotational multimaterial 3D printing, and the trick is deceptively simple: the active material contracts in a preferred direction when it is heated above its transition temperature, while the passive material holds its shape and steers the deformation. By spinning the nozzle as the filament is extruded, the team can place those materials around the cross-section with fine control, pre-programming a strand to bend one way, twist another, or do both at once.
That control goes beyond a single motion. In the new PNAS paper, the researchers say they can independently tune bending and torsion at every cross-section along the filament centerline. They also showed lattices that reversibly contract, expand, and deform out of plane, which is the kind of behavior that starts to look less like a printed part and more like a mechanism. The paper was received December 20, 2025, accepted March 9, 2026, and published April 29, 2026.

For soft robotics, that matters because artificial muscles have spent years fighting the same three problems: low stroke, limited cycle life, and inefficient energy conversion. Harvard’s approach is meant to echo the way biology handles motion, through bundles of fibers that bend and twist like plant tendrils, octopus tentacles, elephant trunks, and even protein-scale structures. The lab already demonstrated temperature-controlled filters and grippers, concrete examples of how a printed object could act before any motor, cable, or hinge is added.
The most interesting takeaway for desktop printing is not that a maker can buy this today, because that is still a gap, but that the design logic is now clearer. A later day version of this could mean self-actuating prints, soft robotic skins, RC parts that change shape with heat, wearables that tighten or relax on command, and printable mechanisms that move without assembly. The Harvard setup still depends on custom materials and a lab-built rotational process, yet it points toward a future where motion is not bolted onto a print after the fact, it is encoded into the filament itself.
This article was produced by Prism’s automated news system from verified source data, official records, and press releases, then run through automated quality and moderation checks before publishing. The system is built and supervised by the people who set the standards it runs under. Read our full AI policy.
Did this article answer your question?


