3D Printed Magnetic Actuators Mimic Muscles, Push, Pull, Crawl, Grasp
A 1.57 g printed actuator lifts 50 g, crawls, and grasps, showing how magnetic soft robotics is moving from lab demo toward maker-relevant motion.
A muscle-like print that does real work
A 1.57 gram actuator lifting 50 grams is the kind of number that makes the whole category feel different. The new work from the Technical University of Darmstadt does not just print a shape, it prints motion, with soft structures that can push, pull, crawl, and grasp under magnetic control.
That matters because the story is no longer only about making parts lighter or more detailed. It is about additive manufacturing creating behavior, not just geometry, and that opens a watchlist worth following for printable animatronics, soft grippers, and experimental RC systems.
What the Darmstadt team built
The paper, submitted to arXiv on April 20, 2026, comes from Muhammad Bilal Khan, Florian Hofmann, Kilian Schäfer, Matthias Lutzi, and Oliver Gutfleisch. Their actuators are made from a thermoplastic and permanent magnet polyurethane and Nd2Fe14B composite, built with laser powder bed fusion inside the Technical University of Darmstadt ecosystem tied to Functional Materials and Additive Manufacturing.
The key move is tuning the laser-energy scale between 1.0 and 3.0. That changes tensile strength from 0.28 to 0.99 MPa while keeping elongation at break in the 30 to 45 percent range, which is exactly the kind of balance soft robotics needs: enough compliance to bend and enough structure to keep working.
Just as important, the process enables 0.5 millimeter-thick flexural hinges that reversibly bend and fold under magnetic fields without damage. For makers, that is the real headline underneath the headline, because thin, repeatable hinges are the difference between a one-off demo and a mechanism you can imagine iterating.
Push, pull, crawl, grasp
The elongated actuator is the clearest proof that this is not just a materials exercise. At 1.57 grams, it lifts 50 grams under a 500 mT magnetic field, which means it carries about 32 times its own weight, and it kept that performance for at least 50 cycles.
That kind of output gives the push and pull story a practical edge. If a printed soft body can repeatedly contract, recover, and keep its load-bearing behavior, the door opens to compact movement systems that do not need pumps, wires, or the usual bundle of external mechanics.
The crawling demonstration is just as important. With anisotropic frictional feet, the robot reached up to 100 percent locomotion success on textured substrates, which is the sort of benchmark that tells you the motion is controlled rather than accidental.
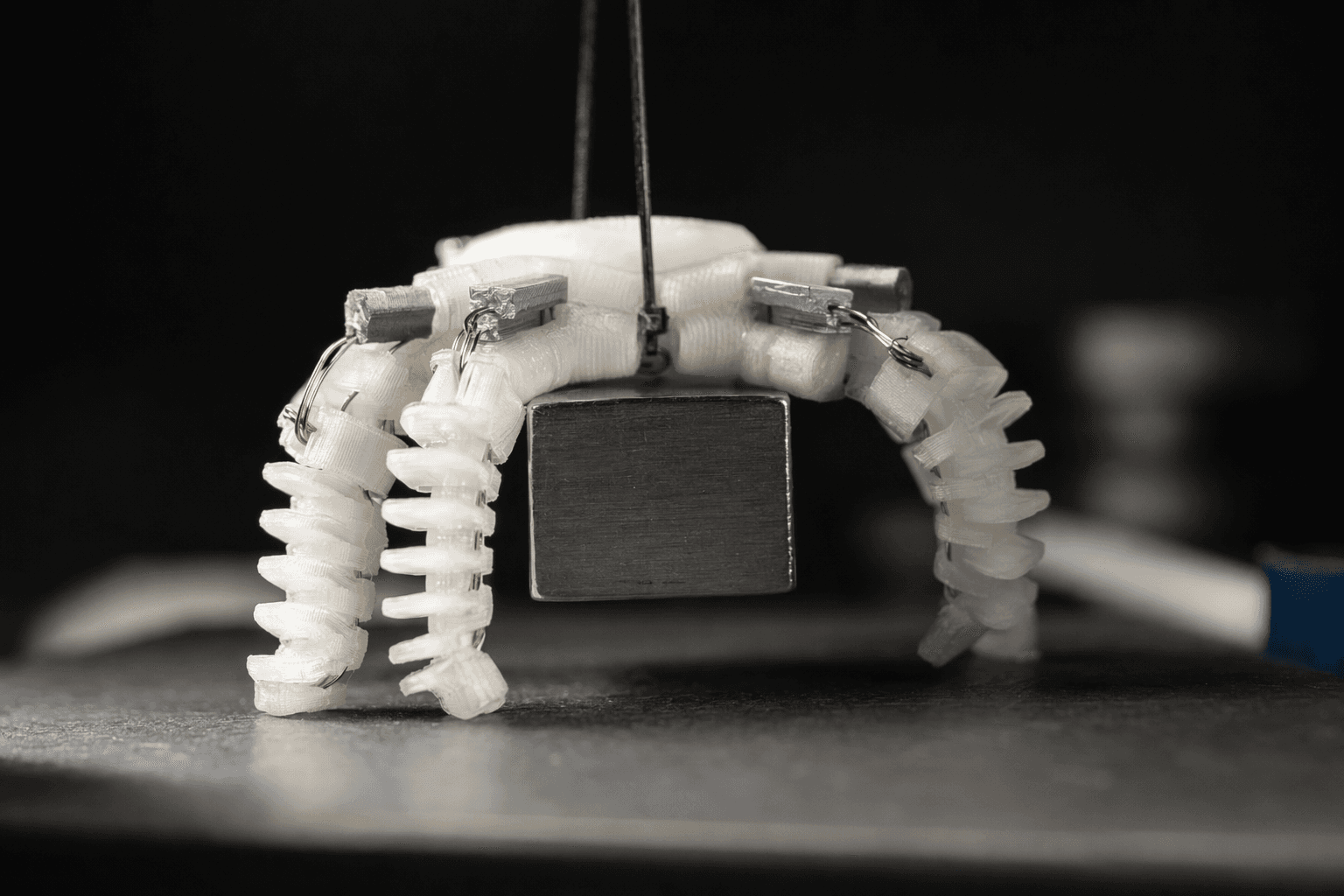
Then there is grasping. A second expandable actuator opens and closes reversibly under a 300 mT field, can grab soft berries and rigid 3D printed geometries, and can anchor inside a tube while holding suspended 50 gram loads. That combination of gentle grasping and firm anchoring is exactly the kind of dual-use behavior that soft robotics has been chasing for years.
Why this is interesting beyond the lab bench
The practical appeal is not that this is a consumer printer upgrade. The bigger shift is that additive manufacturing is expanding what can be physically designed at all, especially when the printed object also carries its own actuation logic.
That is why wearables, automation tools, and medical devices are named as likely directions. A magnetic soft actuator can be self-contained in a way rigid mechanisms often are not, which is useful anywhere you need motion in tight spaces, compliant contact with fragile objects, or a device that can operate without bulky internal hardware.
For a hobby audience, the most relevant takeaway is the workflow, not the exact lab setup. The idea that a printed structure can be programmed to move like a muscle suggests future desktop projects may combine geometry, magnetization, and material behavior in the same build file, especially as printers get better at elastomers, embedded features, and magnetic composites.
The research trail shows how fast the field is moving
This Darmstadt result did not appear in a vacuum. Magnetic soft robotics has been stacking milestones, each one pushing the usable envelope a little further.
In 2023, Nature Communications published a bio-inspired magnetic-driven folded diaphragm robot that used radial magnetization to produce large 3D and bi-directional deformation under a 40 mT magnetic field. That earlier work showed how a one-piece soft form could translate field control into complex shape change.
In 2024, a Nature Communications paper on multifunctional magnetic muscles, reported by Minho Seong, Kahyun Sun, and Hoon Eui Jeong, pushed even further with a phase-change polymer and ferromagnetic particles. It reached a stiffness switching ratio above 2.7 × 10^3 and stretchability above 800 percent, which is a serious signal that soft actuation can be both radically adaptable and mechanically extreme.
Then in 2025, a Nature Communications study by Dezhao Lin, Ruihong Li, Changyu Xu, and Hanqing Jiang described a muscle-inspired elasto-electromagnetic mechanism for insect-scale soft robots. It delivered about 210 N/kg force output, up to 60 percent contraction, a 60 Hz response, and low-voltage operation below 4 volts, showing how quickly compact soft systems are closing in on real robot performance.
What still has to happen before makers can borrow it
The path from this research to printable hobby machines is visible, but it still has a few gates. First, the materials side has to become easier to print outside a specialized lab, with composites that can be handled more like standard desktop-friendly filaments or resins while keeping the magnetic response and the hinge quality.
Second, magnetic field control has to get more practical. The lab demonstrations use 300 mT and 500 mT fields, which are manageable in a research setting but still a high bar for most home setups, especially if the goal is fine control rather than a simple on-off response.
Third, the design workflow has to become more repeatable. The reason the Darmstadt work stands out is that it links geometry, stiffness, magnetization, and motion into one printed system, and that is exactly the kind of integration makers need before magnetic soft robotics turns into a normal build category.
That is the watchlist item worth following now: not just stronger prints, but prints that can move like living tissue. Once additive manufacturing can reliably produce push, pull, crawl, and grasp in one printable architecture, the boundary between a part and a mechanism starts to disappear.
This article was produced by Prism’s automated news system from verified source data, official records, and press releases, then run through automated quality and moderation checks before publishing. The system is built and supervised by the people who set the standards it runs under. Read our full AI policy.
Did this article answer your question?