Menlo Research launches open-source humanoid kit built for 3D printing
Menlo’s $15,000 Asimov kit tries to make humanoid robotics modifiable, repairable, and printable instead of lab-only and out of reach.

Menlo Research is betting that humanoids can be hacked like printers, not just bought like lab equipment. Its open-source Asimov v1 arrived as the “Here Be Dragons Edition,” a completely unassembled, $15,000 kit built around a 1.2-meter, 35-kilogram biped with 25 actuated degrees of freedom.
That price only tells part of the story. Menlo designed most of the structural hardware for Multi Jet Fusion 3D printing, a choice that cuts down the CNC-heavy manufacturing burden that usually locks humanoid platforms behind expensive tooling and slow revision cycles. For builders, that means the frame is not just something to assemble, but something that can be repaired, reprinted, and iterated without waiting on a custom machine shop.
The kit ships with the structural frame, actuators, motors, sensors, wiring harnesses, assembly manuals, instructional videos, and Discord support. Menlo’s documentation goes further, covering the bill of materials, assembly steps, locomotion control, and the robot API. The company also published the mechanical CAD, electrical CAD, simulation model, and onboard software in the Asimov v1 repository when it open-sourced the platform on April 27, 2026.
That openness is the point. Menlo frames Asimov around AI-software-hardware co-design and “right to repair,” and the hardware layout reflects that philosophy with a universal motor-mounting architecture. The arms, legs, torso, and head are meant to be swapped or upgraded without redesigning the whole robot, which lowers the pain of maintenance and makes actuator experiments far less punishing than on most closed humanoid systems. For anyone trying to test a new joint, a new controller, or a new printed bracket, that modularity matters more than a glossy demo.
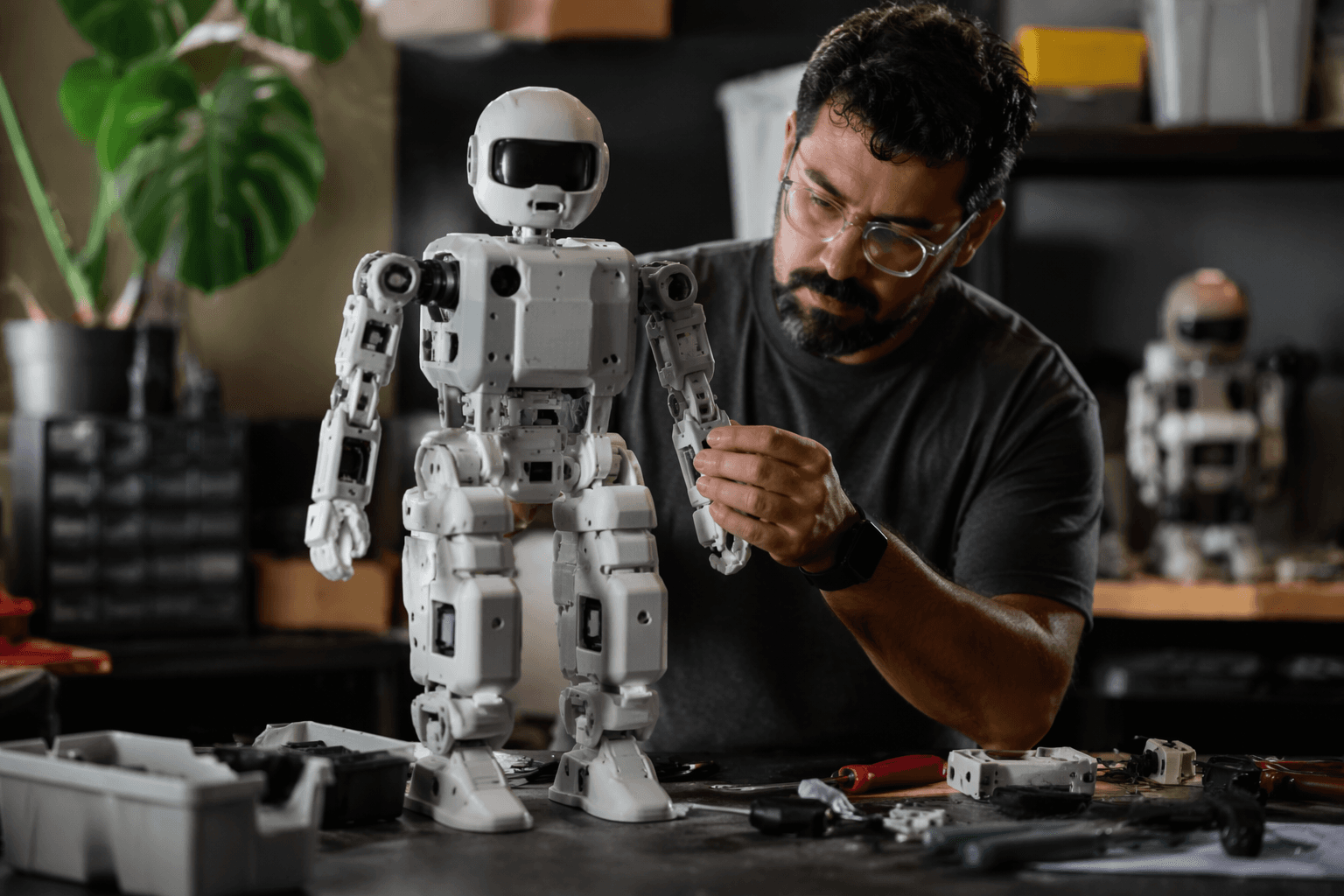
There is real engineering underneath the accessibility pitch. Asimov v1 uses a parallel Revolute-Spherical-Universal ankle mechanism with two degrees of freedom, aimed at spreading torque more evenly and improving balance on uneven ground. The hardware stack also includes a chest-mounted 2MP monocular camera, while the MuJoCo simulation model is built for locomotion policy training and hardware-in-the-loop testing. Menlo’s Processor-in-the-Loop framework adds signal degradation during training so the robot learns to cope with messier real-world conditions.
Menlo first open-sourced Asimov v0, its humanoid legs platform, in January 2026. With v1, the company pushed the idea much further: a full body, full software stack, and a build path that looks designed for independent developers and researchers instead of a multimillion-dollar robotics lab. If Asimov works the way Menlo says it does, the real shift is not that it is a humanoid kit. It is that the kit invites the 3D printing community to modify the machine as a normal part of owning it.
Know something we missed? Have a correction or additional information?
Submit a Tip