MIT 3D-prints working electric linear motor in just three hours
MIT printed a working linear motor in about three hours, but the real story for makers is the five-material process behind it, not a garage-ready shortcut.
MIT has printed a working electric linear motor in about three hours, a small but striking sign that some electromechanical parts may soon be built on demand instead of ordered through a long supply chain. The device was not a simple proof of motion. It was a fully 3D-printed linear actuator made with five materials, and MIT says it performed as well as or better than similar motors that depend on more complicated fabrication and more post-processing.
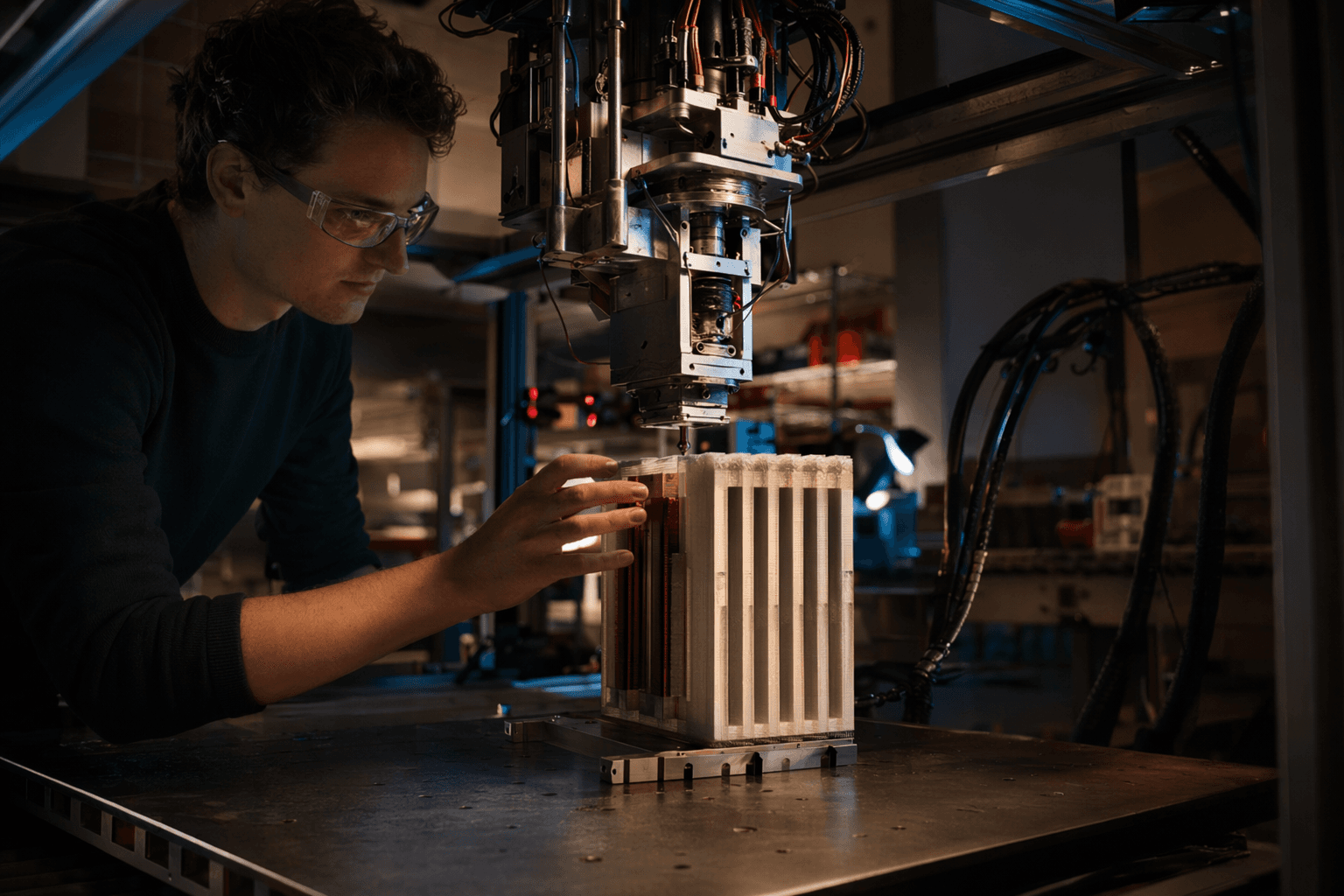
The demonstration came from a multimaterial extrusion platform that used four extrusion tools to handle different printable forms of material in one build. Jorge Cañada, a graduate student in MIT’s Department of Electrical Engineering and Computer Science, led the work with fellow graduate student Zoey Bigelow and senior author Luis Fernando Velásquez-García, a principal research scientist in MIT’s Microsystems Technology Laboratories. Their paper appeared in Virtual and Physical Prototyping on February 18, 2026.
For people who build robots, RC rigs, or custom tools at home, the headline is less “print a motor” than “print a motor with tightly controlled material functions.” MIT’s part used dielectric, electrically conductive, soft magnetic, hard magnetic and flexible materials in a single printed structure. The researchers said the finished motor needed only one post-processing step before it was functional, and one separate estimate put the material cost at about 50 cents. That is impressive in a lab; it is still a long way from the average desktop printer.
That gap matters. A broken motor inside an automated factory machine can stop production, and a replacement part may have to be shipped from a distributor hundreds of miles away. MIT framed the work as a way to make hardware onsite, in one step, instead of relying on a global supply chain. The same logic could help with custom actuators in robots, specialty components in vehicles, and compact parts for medical equipment, where lead times and waste often matter as much as raw performance.
The garage reality is more restrictive. This was a multimaterial system built to coordinate five distinct functional materials and a magnetization step, not a single-filament printer with a new slicer profile. The next milestones the team has discussed, integrating magnetization into the print workflow and moving from linear motors toward rotary motors, point to how much process control still has to be solved before hobbyists can truly print useful electromechanical parts at home.
This article was produced by Prism’s automated news system from verified source data, official records, and press releases, then run through automated quality and moderation checks before publishing. The system is built and supervised by the people who set the standards it runs under. Read our full AI policy.
Did this article answer your question?